
整體概述:本文主要談?wù)勚悄茏撚蚩刂破鞯墓δ芤约皩?shí)驗(yàn)時(shí)如何設(shè)計(jì)工作模式。暫不涉及功能的性能參數(shù)檢測(cè)。

在浩瀚的網(wǎng)絡(luò)世界中,關(guān)于智能座艙域控制器(業(yè)內(nèi)常簡(jiǎn)稱(chēng)為CDC,即cockpit domain controller)的探討可謂是琳瑯滿(mǎn)目。從芯片的卓越性能,到其獨(dú)特的功能特點(diǎn),再到詳盡的拆解分析、設(shè)計(jì)探討以及通信技術(shù)等方面的探討,無(wú)一不展現(xiàn)了這一領(lǐng)域的繁榮與活力。智能座艙作為現(xiàn)代汽車(chē)的重要組成部分,其令人炫目的聲學(xué)、光學(xué)等功能和賣(mài)點(diǎn),都是依托座艙域控制器得以實(shí)現(xiàn)的。而在目前的車(chē)載智能座艙域控制器市場(chǎng)上,高通驍龍SA8295P芯片無(wú)疑是備受矚目的焦點(diǎn)。
今天,我們就以某款車(chē)型搭載的SA8295P芯片智能座艙域控制器為例,深入探討其在DV(Design Verification,設(shè)計(jì)驗(yàn)證)階段的工作模式是如何考慮和確定的。畢竟,無(wú)論車(chē)機(jī)功能多么花俏,若經(jīng)不起實(shí)驗(yàn)驗(yàn)證的考驗(yàn),那么一切努力都將化為烏有。在此過(guò)程中,我們還將提煉出一些具有通用性的原則和方法,以期對(duì)其他汽車(chē)電子零部件的開(kāi)發(fā)和驗(yàn)證提供有益的參考。
實(shí)驗(yàn)驗(yàn)證是產(chǎn)品開(kāi)發(fā)過(guò)程中的關(guān)鍵環(huán)節(jié),其嚴(yán)謹(jǐn)性不容忽視。在確定智能座艙域控制器的工作模式時(shí),我們需要綜合考慮諸多因素。首先,要深入了解芯片的性能特點(diǎn),包括其處理能力、功耗、穩(wěn)定性和散熱等方面。其次,要充分考慮車(chē)輛的使用場(chǎng)景,多功能疊加。此外,還需關(guān)注用戶(hù)的實(shí)際需求,確保域控制器的工作模式能夠滿(mǎn)足用戶(hù)在駕駛過(guò)程中的各項(xiàng)需求。
第一步
在確定產(chǎn)品實(shí)驗(yàn)的工作模式時(shí),首要任務(wù)是深入了解產(chǎn)品的各項(xiàng)功能。鑒于DV測(cè)試的特性,它與黑盒測(cè)試相類(lèi)似,因此,我們不僅需要對(duì)產(chǎn)品的功能有所了解,還需要對(duì)其輸入與輸出進(jìn)行掌握。為了更加具體地說(shuō)明這一點(diǎn),我們將首先對(duì)8295芯片的功能進(jìn)行詳細(xì)介紹。以下是關(guān)于連接器功能定義的示意圖,它有助于我們更好地理解該產(chǎn)品的工作機(jī)制與特性。
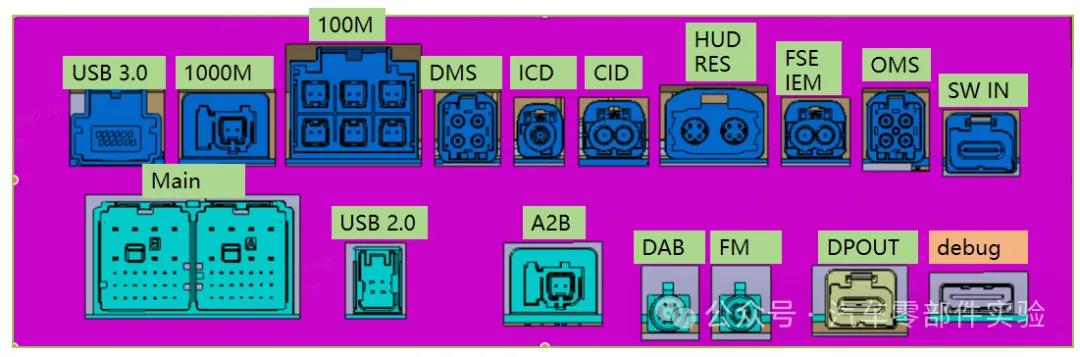
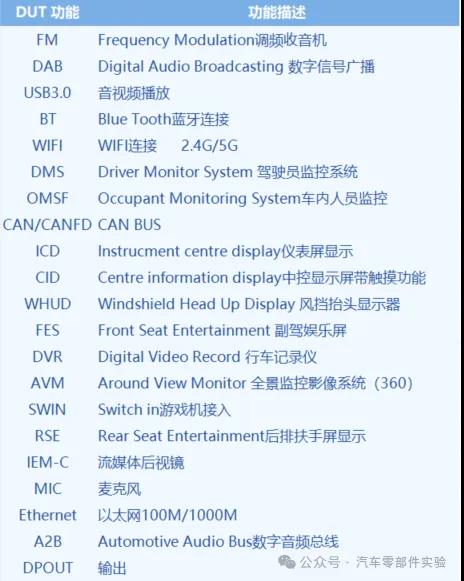
鑒于圖片中包含較多的英文縮寫(xiě),這對(duì)于初學(xué)者而言可能構(gòu)成一定的理解障礙。同時(shí),對(duì)這些縮寫(xiě)所代表的外部設(shè)備連接需求的深入理解也顯得尤為重要。因此,我們依據(jù)主連接器的pin序定義以及其他相關(guān)連接器的特性,經(jīng)過(guò)精心整理,現(xiàn)呈現(xiàn)如下表格。該表格詳盡列出了DUT的各項(xiàng)功能及其對(duì)應(yīng)的功能描述,旨在幫助用戶(hù)更加明晰、精確地理解并應(yīng)用相關(guān)知識(shí),從而提升其操作效率和準(zhǔn)確性。
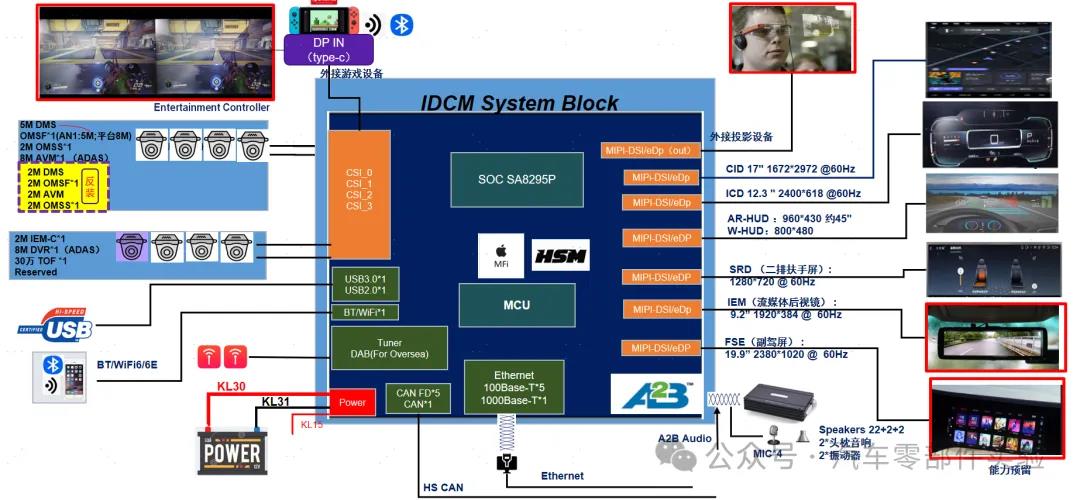
在了解DUT的硬連接輸入輸出功能之余,我們還需深入排查其是否具備無(wú)線(xiàn)輸入輸出芯片的功能,比如某些車(chē)型所搭載的Gyro。鑒于當(dāng)前圖表形式對(duì)記憶的助力有限,大腦對(duì)圖形化文檔的記憶更為深刻與清晰,因此,我們對(duì)此表進(jìn)行了形象化處理。如圖所示,我們將關(guān)鍵外設(shè)以實(shí)物形式進(jìn)行呈現(xiàn),并盡量對(duì)同類(lèi)型外設(shè)進(jìn)行了歸類(lèi),以提升記憶效果。
到此,第一步已經(jīng)完成了,即梳理產(chǎn)品功能。
第二步
在實(shí)驗(yàn)的推進(jìn)過(guò)程中,第二步至關(guān)重要,它要求我們明確掌握各個(gè)獨(dú)立功能的驗(yàn)證方法。這里需要強(qiáng)調(diào)的是,我們所指的驗(yàn)證,是針對(duì)功能本身的驗(yàn)證,而非性能參數(shù)。
功能在測(cè)試過(guò)程中可以表現(xiàn)為正常狀態(tài),但性能參數(shù)或相關(guān)指標(biāo)可能會(huì)存在與標(biāo)準(zhǔn)要求相偏離的情況。因此,對(duì)于性能參數(shù)的檢測(cè),通常會(huì)在各項(xiàng)實(shí)驗(yàn)開(kāi)始前以及實(shí)驗(yàn)結(jié)束后進(jìn)行,以確保實(shí)驗(yàn)結(jié)果的準(zhǔn)確性和可靠性。
第三步
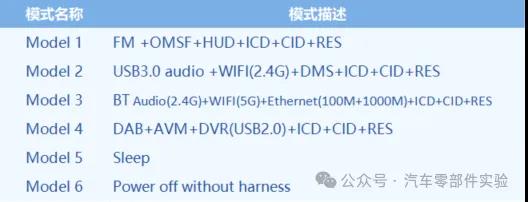
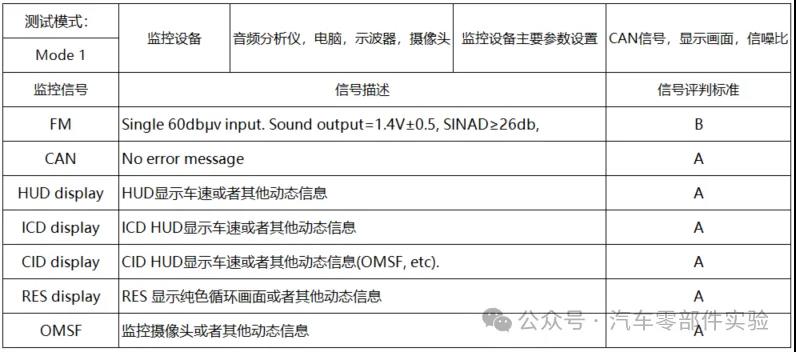
第三步涉及功能的組合分析。在具體的工作場(chǎng)景中,我們需要詳細(xì)考察哪些功能能夠同時(shí)出現(xiàn)或必須同時(shí)運(yùn)行,以確保系統(tǒng)運(yùn)行的穩(wěn)定性和完整性。例如,CID的顯示和觸摸功能在多數(shù)情況下需要協(xié)同工作,以便為用戶(hù)提供直觀(guān)的操作體驗(yàn)。然而,也存在一些功能無(wú)法同時(shí)出現(xiàn)的情況,如FM與USB3.0音視頻的音頻功能,它們?cè)谙到y(tǒng)中通常處于互斥狀態(tài),以避免資源沖突。
此外,還需特別關(guān)注功能之間的邏輯關(guān)系,確保各功能在系統(tǒng)中的協(xié)同作用符合設(shè)計(jì)要求,從而提升整體性能與用戶(hù)體驗(yàn)。據(jù)此,給出此款域控制器的工作模式
座艙域控制器的工作模式是復(fù)雜的,每個(gè)模式都需要單獨(dú)配置和對(duì)應(yīng)的外設(shè)和設(shè)備。
座艙域控制器的工作模式無(wú)疑是一個(gè)復(fù)雜且精細(xì)的體系,它涵蓋了多個(gè)層級(jí)和方面,每個(gè)模式都需要獨(dú)立配置以及對(duì)應(yīng)的外設(shè)和設(shè)備,確保系統(tǒng)的穩(wěn)定與高效運(yùn)行。
每個(gè)工作模式都需要根據(jù)具體的應(yīng)用場(chǎng)景和需求進(jìn)行獨(dú)立配置。例如,在娛樂(lè)模式下,座艙域控制器需要調(diào)整音頻輸出的參數(shù),確保音質(zhì)清晰、音量適中;而在導(dǎo)航模式下,它則需要實(shí)時(shí)接收和處理來(lái)自GPS系統(tǒng)的位置信息,為駕駛者提供準(zhǔn)確的路線(xiàn)引導(dǎo)。這些配置往往需要專(zhuān)業(yè)的技術(shù)人員進(jìn)行操作,以確保系統(tǒng)能夠穩(wěn)定運(yùn)行。
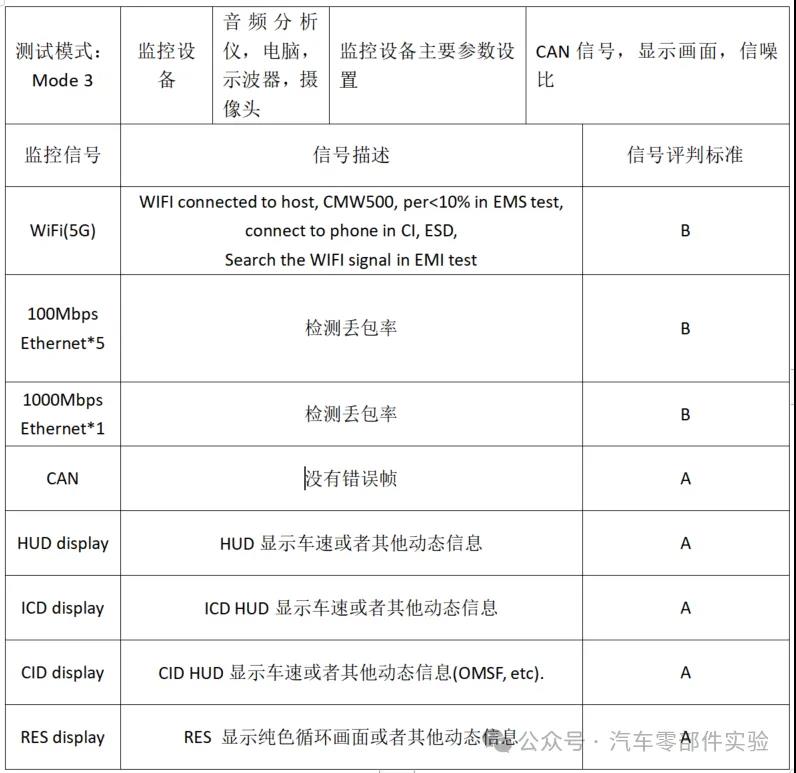
除了配置外,每個(gè)工作模式還需要對(duì)應(yīng)的外設(shè)和設(shè)備。這些外設(shè)和設(shè)備不僅包括顯示屏、揚(yáng)聲器等硬件設(shè)備,還包括各種傳感器和軟件程序。這些外設(shè)和設(shè)備與座艙域控制器之間需要建立穩(wěn)定的通信連接,以實(shí)現(xiàn)數(shù)據(jù)的傳輸和控制指令的執(zhí)行。
model 3:WIFI和以太網(wǎng)的監(jiān)控(WIFI2.4G和WIFI5G都需要測(cè))。
智能座艙域控制器
智能座艙域控制器作為現(xiàn)代汽車(chē)智能化發(fā)展的核心部件,其復(fù)雜性不言而喻。它涉及到眾多技術(shù)的融合與創(chuàng)新,直接關(guān)系到客戶(hù)對(duì)整車(chē)的體驗(yàn)和滿(mǎn)意度。在這個(gè)高度競(jìng)爭(zhēng)的汽車(chē)市場(chǎng)中,智能座艙域控制器的性能與可靠性成為了決定車(chē)輛競(jìng)爭(zhēng)力的重要因素。對(duì)其充分的驗(yàn)證更是重要一環(huán)。
轉(zhuǎn)自汽車(chē)零部件實(shí)驗(yàn)
