
四、HUD發(fā)展?fàn)顟B(tài)
以當(dāng)前技術(shù)狀態(tài)為節(jié)點,HUD已歷經(jīng)了三次迭代過程,分別為組合式抬頭顯示(Combiner HUD,C-HUD)、風(fēng)擋式抬頭顯示(Windshield HUD,W-HUD)以及正在到來的增強(qiáng)現(xiàn)實抬頭顯示(Augmented Reality HUD,AR-HUD)。
圖6 HUD類別
HUD的工作原理可以簡單理解為日常生活中常見的投影儀的工作原理,其中C-HUD是利用在儀表臺上方加裝的半透明樹脂玻璃為介質(zhì),將儀表上的相關(guān)信息進(jìn)行反射以在樹脂玻璃上呈現(xiàn)出虛像投影的過程。由于此方式僅能對相關(guān)內(nèi)容進(jìn)行簡單的圖形和文本的顯示,且存在成像尺寸有限、效果不佳等缺陷,目前正在被逐步取代中。
圖7 C-HUD示意
W-HUD取消了C-HUD中應(yīng)用的半透明樹脂玻璃,并通過光學(xué)反射原理將與駕駛相關(guān)的信息投射到前擋風(fēng)玻璃上,由此形成虛像。由于其成像區(qū)域不再限制于樹脂玻璃,因此該方案相對于C-HUD而言具有更大的顯示區(qū)域,通常該區(qū)域的尺寸可輕松達(dá)到13英寸以上,同時成像的質(zhì)量及視野也要更優(yōu)于C-HUD。
圖8 W-HUD示意
不過由于車輛的擋風(fēng)玻璃通常為曲面反射鏡,所以W-HUD在應(yīng)用中也須根據(jù)擋風(fēng)玻璃的尺寸和曲率去適配高精度曲面反射鏡。目前依托于W-HUD在技術(shù)成熟度、成本、成像難度相對低、成像效果理想等方面的因素,其在車載HUD的應(yīng)用中處于主流地位。
AR-HUD是在W-HUD的基礎(chǔ)上通過汽車智能化過程中所帶來的攝像頭、雷達(dá)等感知硬件并通過數(shù)據(jù)、算法再結(jié)合AR、高精地圖等技術(shù)在毫秒級別內(nèi)對所采集的數(shù)據(jù)進(jìn)行建模,同時利用車輛前擋風(fēng)玻璃為介質(zhì),于車輛前方形成投射虛像,再通過數(shù)據(jù)成像與現(xiàn)實事物的精準(zhǔn)擬合疊加,從而實現(xiàn)數(shù)字信息與實景交通的深度融合效果的技術(shù)手段。

圖9 AR-HUD示意
在AR-HUD的實現(xiàn)過程中,為了將數(shù)字成像與實景進(jìn)行疊加同時又不影響駕駛員的視野,因此在成像上要求至少于駕駛員前方7.5m處形成投影虛像。由于此過程中VID(Virtual Image Distance,虛像距離)和FOV(Field of View,視場角)相對于W-HUD而言都更大,因此AR-HUD所呈現(xiàn)的虛像區(qū)域更廣。據(jù)測算,此虛擬大屏的尺寸可達(dá)到90英寸以上,在大尺寸虛擬屏的加持之下,其所顯示的內(nèi)容將不再局限于車速、電量等常用信息,同時由于相關(guān)技術(shù)水平的提升,其所呈之像也更加清晰醒目。
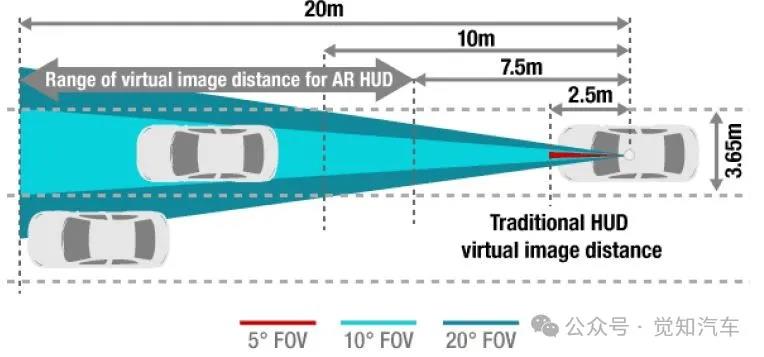
圖10 AR-HUD成像距離示意
在汽車智能化的進(jìn)一步推動之下,AR-HUD方案結(jié)合了AR、ADAS等技術(shù)對行車導(dǎo)航、車輛周圍景物進(jìn)行增強(qiáng)顯示,通過預(yù)告路況、行人等預(yù)警信息及時對駕駛員做出提醒,以此來降低可能的駕駛風(fēng)險。此技術(shù)在汽車智能化的帶動之下,將成為在未來對車載信息進(jìn)行顯示的重要技術(shù)手段。不過由于該方案受到技術(shù)成熟度、成本、駕駛習(xí)慣等因素限制,當(dāng)前還處于市場探測的小規(guī)模量產(chǎn)過程。
五、AR-HUD技術(shù)狀態(tài)
如上所述,在W-HUD與AR-HUD的應(yīng)用過程中,其成像介質(zhì)都是具曲面反射鏡功能的前擋風(fēng)玻璃,其成像過程首先是通過成像單元(Picture Generation Unit,PGU)輸出可視圖像,接著經(jīng)反射鏡將圖像投射到自由曲面鏡上,再經(jīng)自由曲面鏡將原圖像放大,此過程需通過適配擋風(fēng)玻璃的曲率以完成對圖像的光學(xué)畸變矯正,最后再將可正常顯示的圖像投射到擋風(fēng)玻璃上或前方,擋風(fēng)玻璃再通過其反射鏡功能將圖像反射至人眼處,以實現(xiàn)駕駛員對信息的可視化。
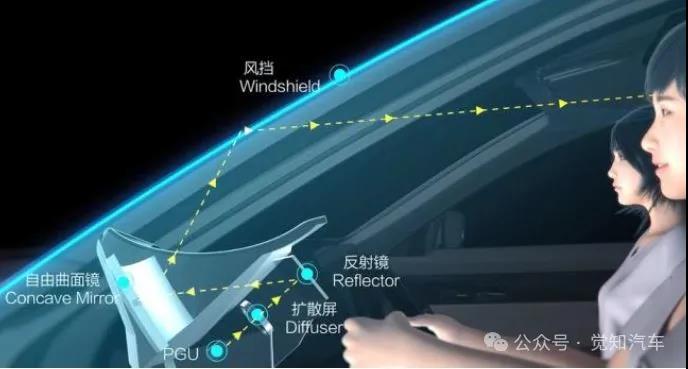
圖11 成像路徑
在此成像過程中,PGU硬件成本占據(jù)了AR-HUD主要BOM成本的30%-50%。根據(jù)其成像技術(shù)的不同,作為主要部件的PGU在車載應(yīng)用中主要有TFT-LCD(薄膜晶體)、DLP(Digital Light Processing,數(shù)字光處理)、LCoS(Liquid Crystal on Silicon,硅基液晶)和LBS(Laser Beam Scanning,激光掃描)四類技術(shù)方案。
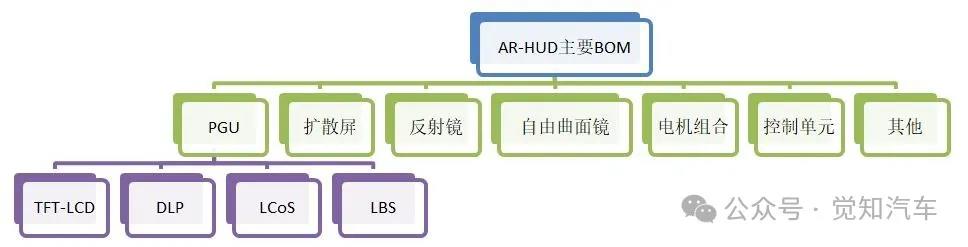
圖12 AR-HUD主要BOM
其中,TFT顯示技術(shù)是使用液晶顯示面板來創(chuàng)建HUD圖像,該技術(shù)是目前最常見且應(yīng)用最為廣泛的方案,具有技術(shù)成熟度高、成本低、使用壽命長等優(yōu)點,但同時也存在清晰度有限、亮度對比度一般等問題,不過鑒于其在成本方面的優(yōu)勢以及當(dāng)前AR-HUD市場規(guī)模尚小的原因,該方案在AR-HUD的應(yīng)用中處于主流地位。
DLP的核心技術(shù)是通過數(shù)字微鏡芯片DMD(Digital Micro-mirror Device)和微鏡片來生成HUD圖像。其過程是通過DMD和聚集在其CMOS上并利用微型鉸鏈所連接的上百萬個微鏡片所形成的微系統(tǒng),并以信號驅(qū)動微鏡片在-12°和+12°之間運(yùn)動,通過其運(yùn)動所導(dǎo)致的角度變化來改變光線的反射角來控制圖像像素的顯示效果,進(jìn)而實現(xiàn)對成像的控制。該方案相對于TFT方案在亮度、對比度等方面都更好,整體成像顯示效果更佳,但由于受到專利的限制,此方案成本要高于TFT。
為規(guī)避DLP方案的專利限制,部分科技企業(yè)基于TFT-LCD方案的圖像調(diào)制原理,通過采用單晶硅基板上的CMOS點陣取代多晶硅TFT點陣以形成新型的反射式投影技術(shù)LCoS。該方案在繼承了TFT-LCD優(yōu)點同時進(jìn)一步克服了TFT-LCD在對比度、亮度等方面的許多不足之處,其在成像效果上相較于TFT-LCD方案更好,但由于新技術(shù)的發(fā)展需要時間沉淀,目前其在技術(shù)成熟度及成本方面尚不如意。此方案已實現(xiàn)裝車的有如華為推出的搭載于飛凡R7上的AR-HUD,于該車型上其成像分辨率可達(dá)1920*730像素。

圖13 搭載LCoS的AR-HUD方案
LBS顯示技術(shù)是通過將RGB三原色激光模組與微機(jī)電系統(tǒng)(Micro-Electro-Mechanical-Systems,MEMS)進(jìn)行結(jié)合的投影技術(shù),此方案的硬件結(jié)構(gòu)包括三色激光模組、MEMS振鏡和濾光片,具有結(jié)構(gòu)簡單,體積小的特性,同時由于其結(jié)構(gòu)特性,該方案在成本上也相對較低。LBS的成像過程是通過RGB三原色的組合進(jìn)行實現(xiàn),其具有成像對比度高、色域廣等特點,但由于激光二極管中的紅色激光器對溫度較為敏感,因此其在實現(xiàn)車規(guī)級的應(yīng)用上具有相當(dāng)?shù)碾y度,且該技術(shù)目前在成像分辨率上僅能達(dá)到約1280*720像素的水平,略低于LCoS,同時該方案在某些場景中還存在散斑等問題。基于技術(shù)及成本的種種因素,應(yīng)用此方案實現(xiàn)整車量產(chǎn)的目前還未有正式上市。
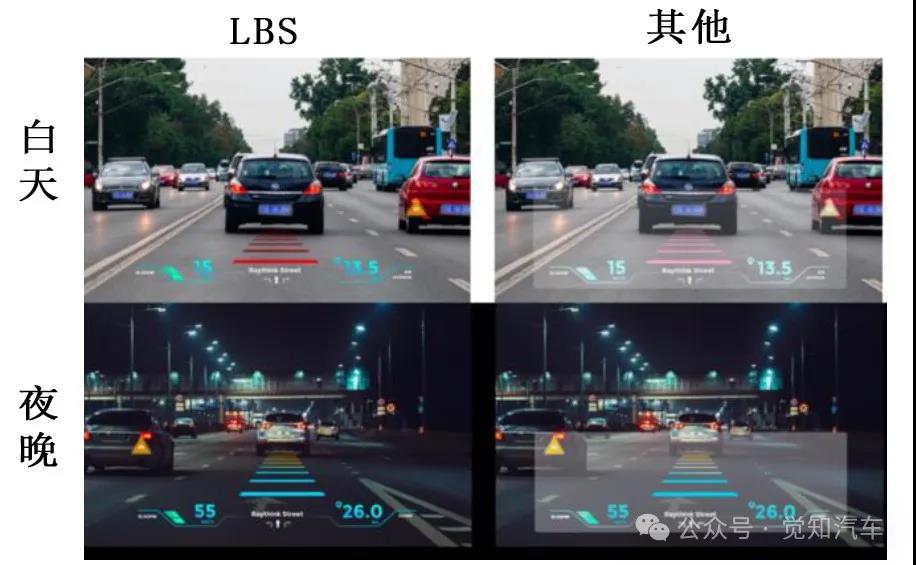
圖14 LBS方案成像與其他方案對比
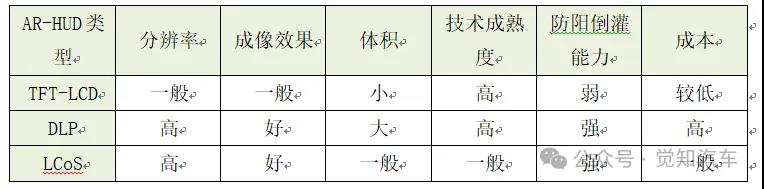
對比已量產(chǎn)的三種方案,對其簡單總結(jié)如下:
表1 不同方案AR-HUD對比
六、總結(jié)
在未來多場景融合的車載應(yīng)用中,用戶對于數(shù)字顯示的要求將會越來越高,而TFT-LCD顯示技術(shù)受限于技術(shù)及成像效果的原因,其市場占有率或會被具有更好成像效果的其他技術(shù)所侵蝕。而在LCoS技術(shù)成熟度達(dá)到穩(wěn)定后,其成本或?qū)⑦M(jìn)一步得到優(yōu)化,在此競爭過程中,限制于DLP專利壁壘導(dǎo)致的高成本,LCoS的市占率或會進(jìn)一步得到提升。
隨著智能化的推動,基于場景化的元素將會越來越多地在HUD中得以顯示,在此虛實融合的應(yīng)用中,伴隨著成像技術(shù)的進(jìn)步,LBS依托于成像效果以及成本優(yōu)勢或?qū)⒃?/span>AR-HUD中占據(jù)一席之地。
轉(zhuǎn)自覺知汽車
